當前位置: 首頁 > 工業控制產品 > 運動控制 > 工業機器人 > 直角坐標型工業機器人
發布日期:2022-04-18 點擊率:77
路徑規劃技術是掃地機器人研究的核心內容之一,機器人定位與環境地圖構建就是為路徑規劃服務的。所謂機器人路徑規劃技術,就是機器人根據自身傳感器對環境的感知,自行規劃出一條安全的運行路線,同時高效完成作業任務。
通常,移動機器人路徑規劃需要解決3個問題:
1)使機器人能從初始位置運動到目標位置;
2)用一定的算法使機器人能繞開障礙物,并且經過某些必須經過的點完成相應的作業任務;
3)在完成以上任務的前提下,盡量優化機器人運行軌跡。
移動機器人的路徑規劃根據其目的的不同可以分為兩種,一種是傳統的點到點的路徑規劃,另一種就是完全遍歷路徑規劃。
點到點的路徑規劃是一種從起始點到終點的運動策略,它要求尋找一條從始點到終點的最優(如代價最小、路徑最短、時間最短)并且合理的路徑,使移動機器人能夠在工作空間順利地通行而不碰到任何障礙物。完全遍歷路徑規劃是一種在二維工作空間中特殊的路徑規劃,指在滿足某種性能指標最優或準優的前提下,尋找一條在設定區域內從始點到終點且經過所有可達到點的連續路徑。
對于掃地機器人來說,其作業任務是清掃房間,它的路徑規劃屬于完全遍歷路徑規劃,需滿足兩個指標:遍歷性和不重復性。所謂遍歷性是指掃地機器人運動軌跡需要最大程度的遍布所有可大空間,它反映的是機器人的工作質量問題。所謂不重復性是指掃地機器人的行走路線應盡量避免重復,反映的是機器人的工作效率問題。
掃地機器人的自主尋路可以分為兩種:隨機覆蓋法和路徑規劃式。

隨機覆蓋法
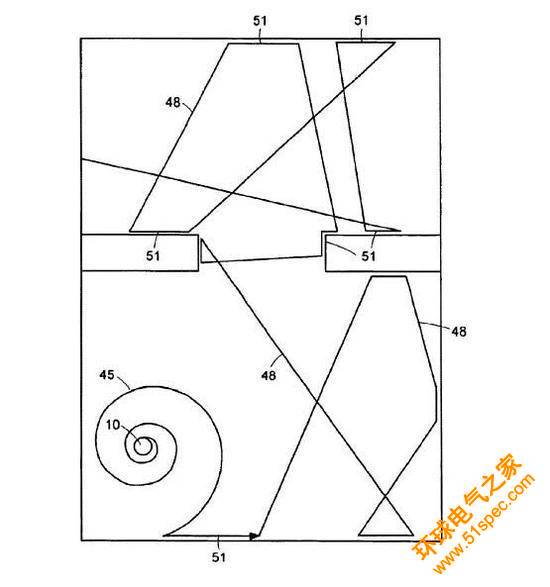
隨機覆蓋法,有人也稱為隨機碰撞式導航,但這并非是指機器人真正與環境中的物體產生碰撞,也非毫無章法的在地板上隨機移動,換言之在工程操作中“隨機”也是一個難以達到要求,隨機覆蓋法是指機器人根據一定的移動算法,如三角形、五邊形軌跡嘗試性的覆蓋作業區,如果遇到障礙,則執行對應的轉向函數。這種方法是一種以時間換空間的低成本策略,如不計時間可以達到100%覆蓋率。隨機覆蓋法不用定位、也沒有環境地圖,也無法對路徑進行規劃,所以其移動路徑基本依賴于內置的算法,算法的優劣也決定了其清掃質量與效率的高低。
美國iRobot公司研發的iRobot Roomba 3-8系列是隨機碰撞尋路系統的典型代表。
據稱,其采用iAdapt智能化清掃技術的專利技術,這是一種軟、硬件相結合的智能化AI清掃系統,硬件由Roomba前方的若干紅外探測器、底部灰塵偵測器和落差傳感器、毛刷膠刷邊刷測速系統等等組成,通過Roomba的硬件傳回的信息,iRobot自身的軟件可以對回傳信息進行分析,根據紅外回傳信息的強度、范圍、高度、轉速、電流大小、阻力等參數,計算出前方障礙物大致形狀,再經過軟件的處理運算,得出的結果就是Roomba下一步清潔方式,Roomba以每秒60次的速度計算周邊障礙物的情況,同時根據所處環境作出40余種清掃動作,如圍繞、折返、螺旋、貼邊、轉身等等。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


