當前位置: 首頁 > 工業控制產品 > 運動控制 > 工業機器人 > 直角坐標型工業機器人
發布日期:2022-04-18 點擊率:58
最近幾年各種移動機器人開始涌現出來,不論是輪式的還是履帶式的,如何讓移動機器人移動都是最核心的工作。要讓機器人實現環境感知、機械臂控制、導航規劃等一系列功能,就需要操作系統的支持,而ROS就是最重要的軟件平臺之一,它在科研領域已經有廣泛的應用。
不過有關ROS的書籍并不多,國內可供的學習社區就更少了。本期硬創公開課就帶大家了解一下如何利用ROS來設計移動機器人。

分享嘉賓李金榜:EAI科技創始人兼CEO,畢業于北京理工大學,碩士學位。曾在網易、雪球、騰訊技術部有多年linux底層技術研發經驗。2015年聯合創立EAI科技,負責SLAM算法研發及相關定位導航軟件產品開發。EAI科技,專注機器人移動,提供消費級高性能激光雷達、slam算法和機器人移動平臺。
移動機器人的三個部分
所謂的智能移動,是指機器人能根據周圍的環境變化,自主地規劃路線、避障,到達目標地。
機器人是模擬人的各種行為,想象一下,人走動需要哪些器官的配合?首先用眼睛觀察周圍環境,然后用腦去分析如何走才能到達目標地,接著用腿走過去,周而復始,直到到達目標地址為至。機器人如果要實現智能移動,也需要眼、腦和腿這三部分的緊密配合。
腿
“腿”是機器人移動的基礎。機器人的“腿”不局限于類人或類動物的腿,也可以是輪子、履帶等,能讓機器人移動起來的部件,都可以籠統地稱為“腿”。
類人的腿式優點是:既可以在復雜路況(比如爬樓梯)下移動、也可以更形象地模仿人的動作(比如跳舞),缺點是:結構和控制單元比較復雜、造價高、移動慢等。
所以大部分移動的機器人都是輪式機器人,其優勢在于輪子設計簡單、成本低、移動快。而輪式的也分為多種:兩輪平衡車、三輪、四輪和多輪等等。目前最經濟實用的是兩個主動輪+一個萬向輪。
眼睛
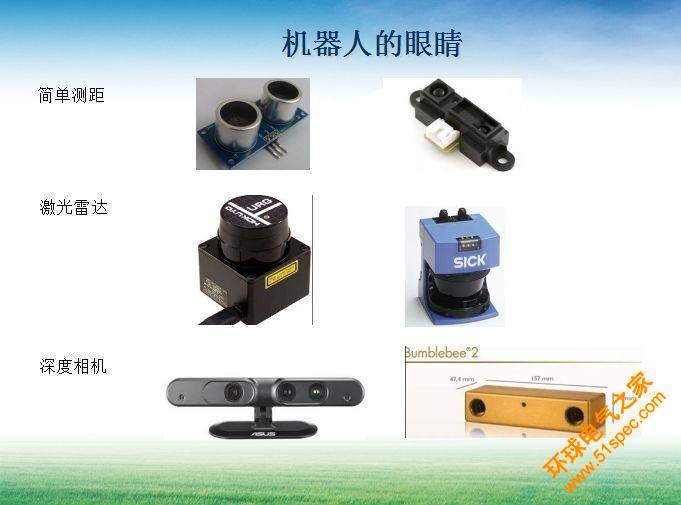
機器人的眼睛其實就是一個傳感器。它的作用是觀察周圍的環境,適合做機器人眼睛的有激光雷達、視覺(深度相機、單雙相機)、輔助(超聲波測距、紅外測距)等。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


